Home
Research
Publications
Courses
Members
News
Small-scale Cooperative Vehicles Project (SCVP)
Home
/
Event
/
Small-scale Cooperative Vehicles Project (SCVP)
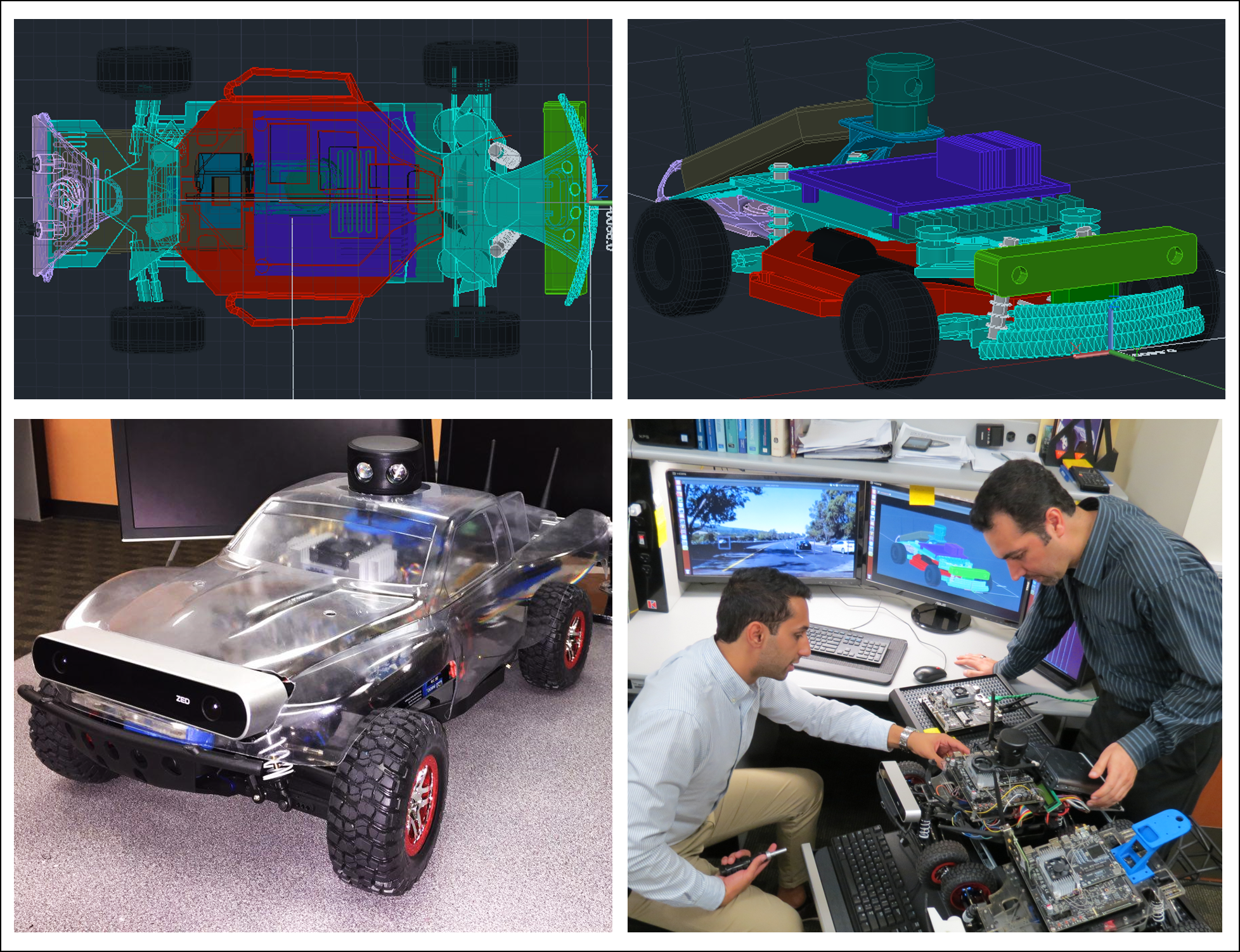
Small-scale Cooperative Vehicles Project (SCVP)
By :
NSL Admin
December 18, 2019
Comments off
Please Visit the Project Website for More Info!
Share:
Categories:
prev post
next post
Related Posts
CAVREL featured in Spectrum News 13
May 2, 2022
CAVREL Test Vehicle
August 21, 2019